Abstract
The sustainable management of fisheries and aquaculture requires an understanding of how these activities interact with natural fish populations. GoPro cameras were used to collect an underwater video data set on and around shellfish aquaculture farms in an estuary in the NE Pacific from June to August 2017 and June to August 2018 to better understand habitat use by the local fish and crab communities. Images extracted from these videos were labeled to produce a data set that is suitable for use in training computer vision models. The labeled data set contains 77,739 images sampled from the collected video; 67,990 objects (fishes and crustaceans) have been annotated in 30,384 images (the remainder have been annotated as “empty”). The metadata of the data set also indicates whether a physical magenta filter was used during video collection to counteract reduced visibility. These data have the potential to help researchers address system-level and in-depth regional shellfish aquaculture questions related to ecosystem services and shellfish aquaculture interactions.
Background & Summary
Shellfish are central to Washington State’s culture, marine ecosystems, and coastal economies. Washington is the nation’s leading producer of farmed clams, oysters, and mussels, contributing approximately $229 million to the State economy1, and supplying fresh shellfish to consumers around the world. With such high cultural, economic, and ecological value, there is substantial demand for growth within the shellfish aquaculture industry. Limited understanding of the ecological implications of converting nearshore habitat to shellfish production is a key impediment to the sustainable expansion of shellfish aquaculture. An improved understanding of how shellfish aquaculture functions as a nearshore habitat (relative to uncultivated areas) will help resource managers overcome this barrier. Consequently, they will be able to better assess potential trade-offs when planning the sustainable expansion of shellfish aquaculture.
Quantifying habitat use by fishes can be logistically challenging and costly because aquaculture sites often have structures in the water impeding sampling nets, the sampling must occur around high tide when the sites are submerged, and large data sets are required to account for mobility and variability among the nearshore fish community. Underwater video is a promising method of data collection, but its efficacy is limited by the time required to process the video. The benefits of using underwater video include the ability to: sample in complex habitats (i.e., aquaculture farms with structures in the water), collect passive observations (i.e., removing the bias of sampling disturbance found in beach seines and snorkel/dive surveys), and improve the quality of data (e.g., by verifying species identifications versus snorkel/dive surveys in which there is only one chance for identification and counting).
This motivated the collection of video data in Puget Sound, a large fjord-like estuary in the northwest USA that is 161 km long with an average depth of 70 m and a 2,143 km coastline. Stratification separates the deep and shallow waters of this estuary because shallow waters tend to be warmer and less dense than deep water, resulting in horizontal layers in the water column (MacCready P., Encyclopedia of Puget Sound, 2017). Puget Sound is comprised of five ecologically distinct sub-basins characterized primarily by geomorphology, extent of freshwater influence, oceanographic conditions, and anthropogenic stressors. Inter-basin differences have been observed for intertidal, subtidal, and nearshore pelagic species in Puget Sound, but no conclusive mechanisms or defining drivers have been identified2,3. Video was collected in this estuary in collaboration with shellfish growers from June to August in 2017 and from June to August in 2018 (the summers of 2017 and 2018, respectively) from the locations shown in the main panel of Fig. 1. The video collection study focused on the intertidal zone (the shallow water region bounded by high tide and low tide levels), and was designed based on existing knowledge that the natural distribution of species and habitat types (including mudflat extent and eelgrass presence) vary across the Puget Sound estuary, and that species’ interactions with aquaculture might also vary4,5,6. The habitat types for this study were defined based on the cultured species, grow-out method, and substrate type: Pacific oysters grown on the sediment (hereafter referred to as to as ‘oysters on bottom’), Pacific oysters in suspended flipbags (hereafter referred to as ‘oysters in flipbags’), Manila clams grown in the sediment under anti-predation nets (hereafter referred to as ‘clams’), and ‘other’, which was used to group sites that were a mix of the other standardized habitat sites and geoduck sites. Individually, the habitats in the ‘other’ category represented too small a sample size to warrant their own habitat category. These habitats may have been unique to a certain site or reflected short-term or interim habitat types. Examples of these standardized habitat types are indicated in the side panel in Fig. 1. In addition to the five aquaculture mesohabitat types, two types of reference mesohabitats (where no aquaculture was present) were included at each farm, where available. Reference sites were categorized as eelgrass (Z. marina or Z. japonica) or sediment (a range of mudflats to more gravelly beaches, sometimes with low-density eelgrass, Z. marina or Z. japonica, present), depending on the prominent mesohabitat characteristics. In regions where eelgrass was present (North Sound and Hood Canal), oysters in flipbags were often located at depths in which eelgrass would naturally occur, while clams and oysters on bottom were often in shallower, more naturally sediment-dominated, or gravelly habitats. These sites were 30 to 60 m away from existing aquaculture and represented the range of natural habitats in the area. This distance was selected to maximize the similarity in environmental conditions and depth but minimize potential effects from aquaculture sites. Cameras were mounted on two PVC poles, which were placed 125 cm from the base of the camera pole and 1 m apart, so that the field of view was 1 m2 (marked by two more PVC poles). The distance of 125 cm compensated for the extra 25 cm of off-camera area created because of the angle of the camera.

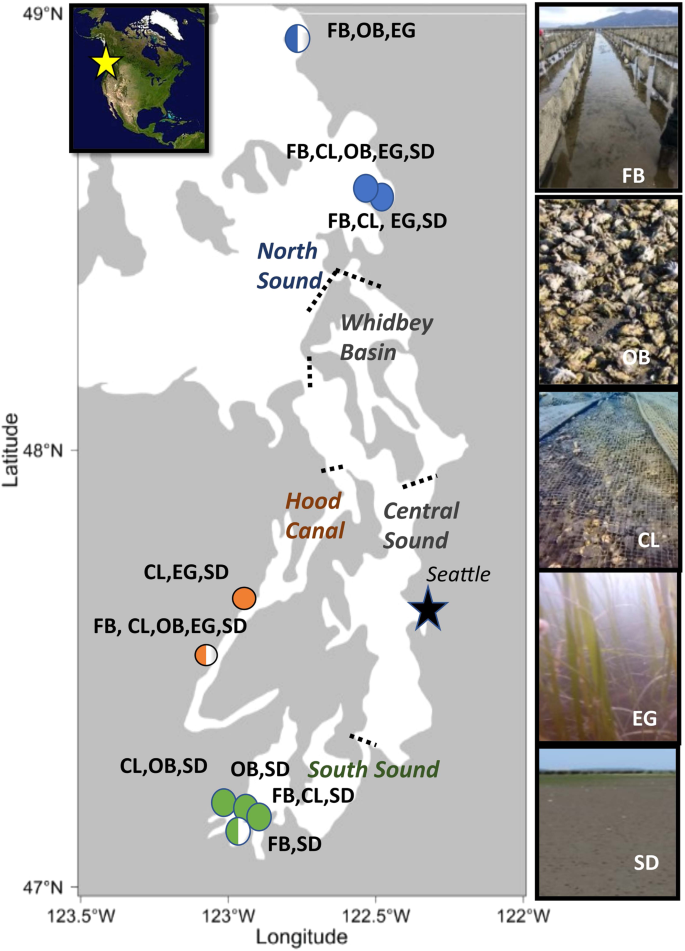
The 9 sample sites in North Sound (blue circles), South Sound (green circles), and Hood Canal (orange circles) in Puget Sound, Washington, USA. The 5 natural basins are labeled with their boundaries marked by dashed black lines. The photos in the figure show the 5 mesohabitat types that were sampled approximately twice per summer in 2017 and 2018: Pacific oysters in flipbags (FB), Pacific oysters on bottom (OB), Manila clams (CL), uncultured eelgrass (EG), and uncultured. In the figure, full circles indicate that a given site was sampled in both years, and half-filled circles indicate that the given site was only sampled in 2018. This figure has been adapted from a previously published figure in Ferriss et al.2.
Images extracted from these videos were labeled to indicate the presence or absence of fishes or crabs (denoted as animals) and the coordinates of bounding boxes are available for images that contained animals. Our data set has been archived on Mendeley Data7 (under the title NOAA Puget Sound Nearshore Fish 2017–2018) and can also be accessed as one of the data sets in the Labeled Information Library of Alexandria: Biology and Conservation (LILA BC).
Other researchers have made labeled fish data sets in underwater environments publicly available, and a curated list is available from LILA BC, which includes brackish-water data sets such as the work by Cutter et al.8, (as well as other conservation data sets); three are highlighted in Table 1. Our data set adds to the available data corpus by contributing additional underwater images, without artificial lighting, of fish and crab species that are endemic to the Pacific Northwest region of the United States. They also provide examples of eelgrass-dominated and muddy environments, geoduck cultivation locations, clam cultivation locations, and oyster cultivation locations (on bottom and in flipbags). Water clarity varied because of high algae concentration or the presence of bubbles that obscured the camera lens as shown in Fig. 2. For particular ecological studies, such as studies of animal behavior, it is desirable to minimize changes to the natural environment when collecting data, which discourages the use of artificial light sources. Data sets that feature brackish water are rare, and naturally lit examples showcasing field data collection challenges are even more rare and will allow for the training of models that are able to support such studies. The inclusion of these difficult field conditions may make such algorithms more robust.

Examples a (from Supplementary files 1–5) and b (from Supplementary files 6–10) of the range of image quality for each habitat type. Note that the Oysters in flipbags images (both a and b) do not show the flipbags themselves since they were above the field of view. Examples of cases where bubbles obstructed the camera view are also shown (Eelgrass (a) and Sediment (a)).
Methods
The production of this labeled data set was a multi-stage process, which is illustrated in Fig. 3. Each phase is summarized, and further details for each phase are supplied below.

Phases of production of the labeled data set.
Video collection
In collaboration with shellfish growers, underwater GoPro cameras (models GoPro Hero 3+ and Hero 4) were used to document crabs (e.g. Dungeness crabs), and nearshore fishes (including outmigrating salmonids) in both shellfish aquaculture and uncultivated nearshore habitats from 6 farm locations (in North Sound and South Sound) twice per summer from June to August 2017, and at 9 farm locations from June to August 2018. In Fig. 1, full circles indicate that a given site was sampled in both years, and half-filled circles indicate that the given site was only sampled in 2018. These locations were distributed throughout North Sound, South Sound, and Hood Canal. Five mesohabitat types (visually distinct habitats) in Puget Sound are present in the data set, which are shown in the side panel of Fig. 1. Three aquaculture sites and two reference sites are included in the data set; however, there were no eelgrass sites in South Sound. Figure 4 illustrates the positioning of the cameras at a given location (the 9 locations sampled in the study area shown in the main panel of Fig. 1). Two cameras were placed facing the incoming tide since this was the direction of best visibility.

Camera locations in aquaculture (oysters in flipbags, oysters on bottom, clams) and reference (sediment, eelgrass) mesohabitats for a given aquaculture farm (dashed line) during a single sampling event. Two cameras were set in each mesohabitat for every sampling event with a field of view of 1 m2. Reference sites were 30 m away from the edge of aquaculture habitat but at similar depth and other environmental conditions. On certain farms, the same site served as a reference for multiple aquaculture sites if available reference areas were limited and the habitats were similar. Adapted from a figure previously published in Ferriss et al.2.
Cameras were generally deployed for 2–3 days (to ensure a minimum of 48 hours of data). They would typically be deployed at low tide on the first day (Day 1). They would be set to turn on to record at high tide that day, and then again at high tide on Day 2. The cameras recorded for 2 minutes every 10 minutes during a 3-hour period near high tide. They were then collected on the third day at low tide for necessary maintenance, such as changing batteries and sim cards. The cameras would then be redeployed in the following month at the sites.
More than 1200 hours of video were collected from the 9 shellfish aquaculture locations around Puget Sound, WA. Videos from select sites in 2017 had a predominantly green background because of high algae concentration in the water; therefore, in 2018, the GoPro cameras were outfitted with magenta filter caps (PolarPro) to improve visibility in the videos. Occasionally field video was obscured by weather or environmental conditions that caused bubbles to collect between the filter and the camera lens.
Data pre-processing
The videos that were collected from each sampling date, farm, and habitat type (eelgrass, sediment, oysters on bottom, oysters in flipbags, and clams) resulted in a data set of approximately 200,000 videos. Images were extracted from these videos, and time stamps were mapped to the image files prior to annotation of animals. Approximately 60% of the images in the data set were from videos in 2018 where magenta filter caps were used. The approximate percentage of images by habitat type is documented in Table 2, and the approximate percentage of images by animal type is given in Table 3.
Data labeling
Data labeling (or data annotation) describes the process of adding labels (or annotations) to data to provide context for later use in training machine learning models. A high-quality labeled data set is the result of an iterative and exhaustive process, and the goal for this data set was an accuracy of greater than 95% on both an image and data set level.
More than a dozen persons formed the labeling team for this project. The annotators used labeling software (a proprietary tool created by iMerit), which featured the ability to perform task-based labeling and had the core features that allowed the annotators to: 1) group frame-level sub-tasks within a larger task, so that a single person would be responsible for reviewing a video in its entirety; 2) easily navigate forward and backward between frames in order to more easily detect changes between frames, or movement related to the presence of difficult to detect fish; 3) label objects of interest with attributes and bounding boxes (as shown in Fig. 5); and 4) produce a standardized JSON output mapping of frames to annotation metadata. The frames of the videos were annotated at a predetermined sampling rate during pre-processing. The labeling exercise was initiated with a series of small calibration batches to ensure consistency in the alignment of tasks and the quality standards required from the labeling team. Two individuals annotated the frames for each video in its entirety; one person performed a first-pass annotation and the second performed a quality-check pass and edited any discrepancies. Images from the oysters on bottom sites were particularly challenging to annotate. These sites attract many small crabs that are well camouflaged. Users should be aware that annotations for these habitats likely underestimate the presence of crabs.

Example of bounding box annotation. The white poles in the background mark the 1 m2 field of view.
After this annotation process was completed, an additional label was created to indicate whether a magenta filter cap was used in the data collection. This label was inferred by matching portions of the file names of the images to the video collection location notes. The addition of this label to the final data set was manually audited for accuracy. Inconsistencies or errors discovered in the labeled data were used to further refine the labeling process.
Data Records
The open-source data set is available for download from Mendeley Data7 (under the title NOAA Puget Sound Nearshore Fish 2017–2018) and can also be accessed from LILA BC.
This approximately 7 GB data set contains 77,739 images sampled from the collected videos; 67,990 objects (primarily fishes and crabs) have been annotated in 30,384 images. The remainder of the images (47,355 images) have been annotated as “empty”. All images (with and without animals) are at a resolution of 1920 × 1080 pixels.
Annotations are provided in a widely used format for computer vision data sets, (the COCO Camera Traps JSON format). The provided JSON file contains the following key-value pairs:
-
info: This key corresponds to a dictionary that contains metadata about the data set.
-
version: The version of the data set.
-
description: A brief description of the data set.
-
year: The year the data set was uploaded.
-
contributor: The entity that contributed to the data set (‘NOAA Fisheries’).
-
-
annotations: This key corresponds to a list of dictionaries.
-
id: A unique identifier for the annotation.
-
image_id: The identifier for the image associated with this annotation.
-
category_id: The identifier for the category associated with this annotation.
-
sequence_level_annotation: A Boolean value that indicates whether the annotation is at the sequence level.
-
-
images: This key is linked with a list of dictionaries. Each dictionary represents a single image:
-
width: The width of the image in pixels.
-
height: The height of the image in pixels.
-
file_name: The name of the image file.
-
location: The location associated with the image.
-
id: A unique identifier for the image.
-
filter: A Boolean value that indicates whether a magenta filter cap was used in the collection of the video associated with the image.
-
-
categories: This key also corresponds to a list of dictionaries. Each dictionary represents a single category:
-
id: A unique identifier for the category (0 or 1).
-
name: The name of the category.
Note that locations have been replaced with random IDs to preserve the confidentiality of the local farms.
For example, consider the example below showing typical entries for an empty image:
-
-
‘annotations’:
-
‘id’: ‘bc8df6be-1207-11ed-a46d-5cf3706028c2’,
-
‘image_id’: ‘SD11_227_6_26_2017_1_73.73.jpg’,
-
‘category_id’: 0,
-
‘sequence_level_annotation’: False
-
-
‘images’:
-
‘width’: 1920,
-
‘height’: 1080,
-
‘file_name’: ‘SD11_227_6_26_2017_1_73.73.jpg’,
-
‘location’: ‘loc_bc8df6bd-1207-11ed-8899- 5cf3706028c2’,
-
‘id’: ‘SD11_227_6_26_2017_1_73.73.jpg’,
-
‘filter’: False
-
-
‘categories’:
-
‘id’: 0,
-
‘name’: ‘empty’
-
Technical Validation
Labeled data were evaluated against set criteria to ensure that all labeled data were annotated in accordance with the same set of rules, such as the object classes requested, the tightness of the bounding boxes, and the treatment of ambiguous cases. Annotators used consistent definitions for each object (fishes and crabs) and labels were cross-checked (as discussed in the Methods section); ambiguous cases were labeled by consensus. After annotation of fishes and crabs, the labeled data set was verified manually. Inconsistencies or errors discovered in the labeled data were used to further refine the labeling process. The source data that was used was sufficiently broad in scope and quantity to be representative of real-world conditions.
It is important to note that this video data set is restricted by a limited field of view9,10,11. The downward angle of the pair-placed cameras and timing of the recordings may have missed fishes coming in on the leading edge of the tide (i.e., in the first waters of the tide) since recordings were made at slack tide (i.e., when currents were weakest) once the tide was already in and before it receded.
Usage Notes
Users should note that some species were well represented in the data set, but many were not. Although this data set does not include a species label, there are numerous species that have large sample sizes of observations across multiple regions in Puget Sound. Users can expect to see examples of some of the higher sample size species: surf perch (Embiotocidae), various crabs (Hemigrapsus and juvenile Metacarcinus), sculpins (Cottidae), and flatfish2).
These kinds of data sets contribute to broader applications related to habitat changes due to climate change or human impacts2,12,13. This data set (and similar) also has the potential to address questions related to estuarine/ nearshore marine ecosystems at the system level. They can be applied to more in-depth regional shellfish aquaculture questions related to ecosystem services and interactions of shellfish aquaculture. Ferriss et al.2 and Shinn et al.12 used free and open-source video editing software in their work to analyze subsets of video data (BORIS Behavioral Observation Research Interactive Software). Computer vision models would be helpful in expanding video analysis capability through automation in these cases, and a variety of water conditions (brackish to clear) would make such models more robust.
It is likely that researchers who seek to use this data set to train models will be best served by augmentation with other labeled data–particularly for underrepresented species. Additionally, ensuring that the training data set is balanced with respect to the image background/habitat type may be helpful. Despite these caveats, this data set’s representation of naturally-lit habitats should be useful in improving machine learning model performance under brackish water conditions.
Code availability
This is an image data set and annotations have been provided in a widely used format for computer vision data sets–the COCO Camera Traps JSON format. Since the annotations have already been included in a standardized format, no additional code has been supplied.
References
-
National Marine Fisheries Service. Fisheries economics of the United States, 2020. Tech. Rep. NMFS-F/SPO-236, U.S. Dept. of Commerce, NOAA (2023).
-
Ferriss, B. et al. Characterizing the habitat function of bivalve aquaculture using underwater video. Aquaculture Environment Interactions 13, 439–454 (2021).
Google Scholar
-
Ebbesmeyer, C., Word, J. Q. & Barnes, C. A. Puget Sound: A fjord system homogenized with water recycled over sills by tidal mixing. (CRC Press, Boca Raton, Florida, 1988).
-
Greene, C., Kuehne, L., Rice, C., Fresh, K. & Penttila, D. Forty years of change in forage fish and jellyfish abundance across greater Puget Sound, Washington (USA): anthropogenic and climate associations. Marine Ecology Progress Series 525, 153–170 (2015).
Google Scholar
-
Rice, C. A., Duda, J. J., Greene, C. M. & Karr, J. R. Geographic patterns of fishes and jellyfish in Puget Sound surface waters. Marine and Coastal Fisheries 4, 117–128 (2012).
Google Scholar
-
Shelton, A. O. et al. Forty years of seagrass population stability and resilience in an urbanizing estuary. Journal of Ecology 105, 458–470 (2017).
Google Scholar
-
Farrell, D. et al. NOAA Puget Sound nearshore fish 2017–2018. Mendeley Data, https://doi.org/10.17632/n73g6ysv8c.1 (2023).
-
Cutter, G., Stierhoff, K. & Zeng, J. Automated detection of rockfish in unconstrained underwater videos using Haar cascades and a new image dataset: labeled fishes in the wild. In 2015 IEEE Winter Applications and Computer Vision Workshops, 57–62 (IEEE, 2015).
-
Sund, D. M. Utilization of the non-native seagrass, Zostera japonica, by crab and fish in Pacific Northwest estuaries (2015).
-
Marini, S. et al. Tracking fish abundance by underwater image recognition. Scientific reports 8, 1–12 (2018).
Google Scholar
-
Muething, K. A., Tomas, F., Waldbusser, G. & Dumbauld, B. R. On the edge: assessing fish habitat use across the boundary between Pacific oyster aquaculture and eelgrass in Willapa Bay, Washington, USA. Aquaculture Environment Interactions 12, 541–557 (2020).
Google Scholar
-
Shinn, J. P., Munroe, D. M. & Rose, J. M. A fish’s-eye-view: accessible tools to document shellfish farms as marine habitat in New Jersey. USA Aquaculture Environment Interactions 13, 295–300 (2021).
Google Scholar
-
Mercaldo-Allen, R. et al. Exploring video and eDNA metabarcoding methods to assess oyster aquaculture cages as fish habitat. Aquaculture Environment Interactions 13, 277–294 (2021).
Google Scholar
Acknowledgements
The authors thank the following collaborators: The Nature Conservancy, WA Sea Grant, and the shellfish aquaculture industry (7 shellfish farms & the Jamestown S’Klallam Tribe). The authors are also thankful for support from Microsoft’s AI For Good program and funding that was provided by the NOAA Office of Aquaculture Grant (NA17OAR4170218) and Washington Sea Grant (UWSC10159).
Author information
Authors and Affiliations
Contributions
(UW) D.M.F. produced initial drafts of the manuscript, edited contributions from all coauthors to produce the final submission, and added additional labels (indication of filter usage); (NOAA) B.F., K.V. and B.S. collected the video data and added additional labels (indication of filter usage); (iMerit) L.R. annotated images from the video data set to indicate the presence of fish and crabs; (MS) A.T., S.P., S.M., J.W., D.M. and R.D. pre-processed the data prior to labeling, reviewed the labeled results, and converted annotations to the COCO Camera Traps JSON format. All authors reviewed the manuscript.
Corresponding author
Ethics declarations
Competing interests
The authors declare no competing interests.
Additional information
Publisher’s note Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
Supplementary information
Supplementary Files
Rights and permissions
Open Access This article is licensed under a Creative Commons Attribution 4.0 International License, which permits use, sharing, adaptation, distribution and reproduction in any medium or format, as long as you give appropriate credit to the original author(s) and the source, provide a link to the Creative Commons licence, and indicate if changes were made. The images or other third party material in this article are included in the article’s Creative Commons licence, unless indicated otherwise in a credit line to the material. If material is not included in the article’s Creative Commons licence and your intended use is not permitted by statutory regulation or exceeds the permitted use, you will need to obtain permission directly from the copyright holder. To view a copy of this licence, visit http://creativecommons.org/licenses/by/4.0/.
Reprints and Permissions
About this article
Cite this article
Farrell, D.M., Ferriss, B., Sanderson, B. et al. A labeled data set of underwater images of fish and crab species from five mesohabitats in Puget Sound WA USA.
Sci Data 10, 799 (2023). https://doi.org/10.1038/s41597-023-02557-6
-
Received: 13 March 2023
-
Accepted: 11 September 2023
-
Published: 13 November 2023
-
DOI: https://doi.org/10.1038/s41597-023-02557-6